size(8.5cm,12cm,IgnoreAspect);
usepackage("fourier","upright");
label(minipage("\small\it
Rappelons que l'extension geometry de Ph.Ivaldi
introduit la possibilit\'e de travailler dans plusieurs rep\`eres
et de nouveaux types d'objets (point, segment, line, triangle, arc, ...)
auxquels peuvent s'appliquer
les applications pr\'ec\'edentes.",8.5cm),(0,4),E);
label("\bf Applications affines ajout\'ees par geometry.asy",(0,1),E);
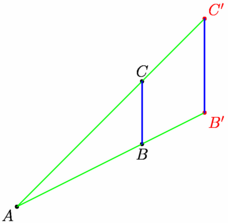
string[] t={"scale(real k, point M)",
"projection(point A, point B)",
"scale({\footnotesize real k,point A,point B,point C,point D,bool safe=false})",
"xscale(real k, point M)",
"yscale(real k, point M)",
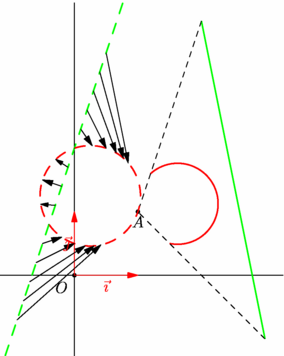
"scaleO(real x)",
"xscaleO(real x)",
"rotateO(real angle)",
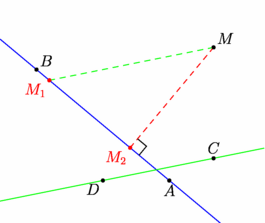
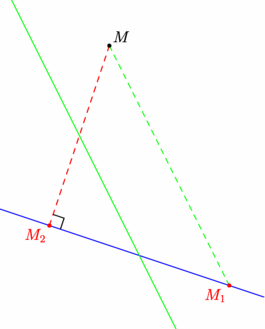
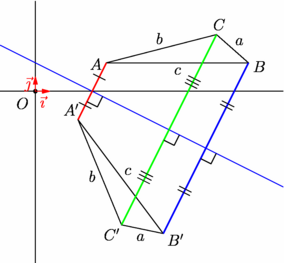
"reflect(line l)",
"reflect(line l1, line l2, bool safe=false)",
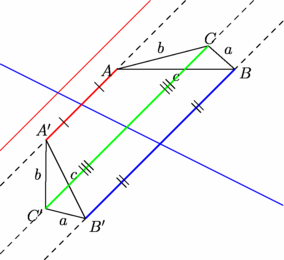
"scale(real k, line l1, line l2, bool safe=false)",
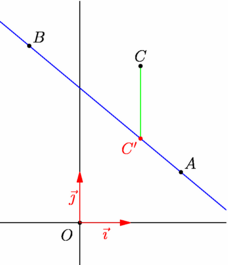
"projection(line l)",
"projection(line l1, line l2, bool safe=false)",
"vprojection(line l, bool safe=false)",
"hprojection(line l, bool safe=false)"
};
for(int y=0; y<t.length; ++y) dot(t[y],(0,-y),3E);
label("\bf Libre \`a vous d'en d\'efinir d'autres ! ;-)",(0,-15),E);