import graph3;
import math;
size(8cm,0);
currentprojection=perspective(4,2,2);
real a=1.2;
pen bg=palered+opacity(0.5);
draw(surface((a,0,0)--(a,0,a)--(0,0,a)--(0,0,0)--cycle),bg);
draw(surface((0,a,0)--(0,a,a)--(0,0,a)--(0,0,0)--cycle),bg);
draw(surface((a,0,0)--(a,a,0)--(0,a,0)--(0,0,0)--cycle),bg);
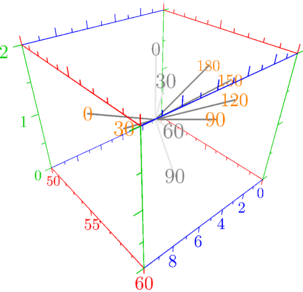
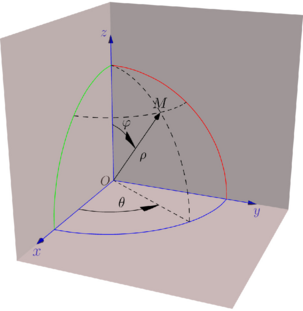
label("$O$",(0,0,0),W);
real rayon=0.8, phi=40, theta=60;
triple pM=rayon*dir(phi,theta);
draw(O--rayon*dir(90,theta),dashed);
label("$M$",pM,N);
draw("$\rho$",O--pM,S+E,Arrow3,PenMargin3);
draw("$\varphi$", reverse(arc(O,0.5*pM,0.5*Z)),
N+0.3E,Arrow3(DefaultHead2(normal=X-Y),size=16bp));
draw("$\theta$", arc(O,0.5*X,0.5*(pM.x,pM.y,0)),
N+0.3E,Arrow3(DefaultHead2(normal=Z),size=16bp));
real r=sqrt(pM.x^2+pM.y^2);
draw(arc((0,0,pM.z),(r,0,pM.z),(0,r,pM.z)),dashed);
draw(arc(O,rayon*Z,rayon*dir(90,theta)),dashed);
draw(arc(O,rayon*Z,rayon*X),.5bp+green);
draw(arc(O,rayon*Z,rayon*Y),.5bp+red);
draw(arc(O,rayon*X,rayon*Y),.5bp+blue);
limits(O,X+Y+Z);
xaxis3(Label("$x$",1),blue,arrow=Arrow3);
yaxis3(Label("$y$",1),blue,arrow=Arrow3);
zaxis3(Label("$z$",1),blue,arrow=Arrow3);