Liste des figures
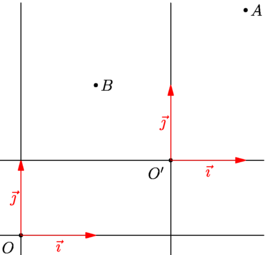
figure 0001
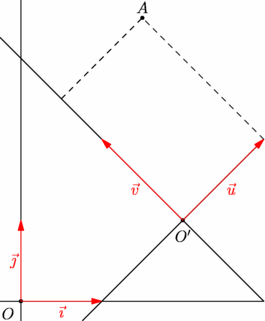
figure 0002
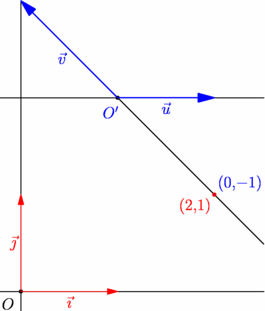
figure 0003
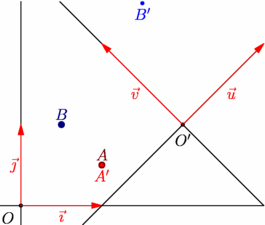
figure 0004
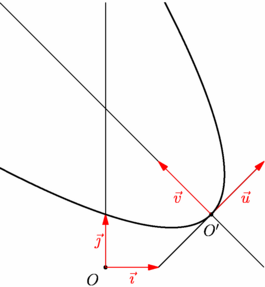
figure 0005
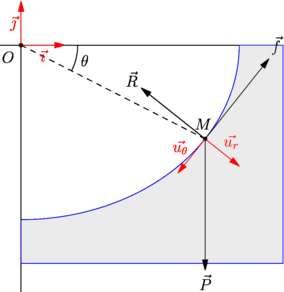
figure 0006
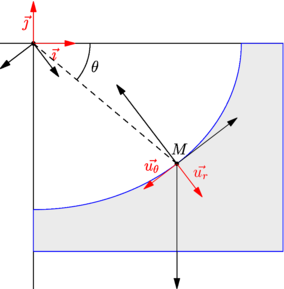
figure 0007
figure 0001
figure 0002
figure 0003
figure 0004
figure 0005
figure 0006
figure 0007

|
// import geometry_dev; // extension devenue l'extension geometry officielle import geometry; // le 12/05/09, dans la version 1.71 d'asymptote. :-)) size(7cm,0); // le repère par défaut est defaultcoordsys, // cest celui utilisé nativement par asymptote ; // le repère courant est currentcoordsys // dont la valeur par défaut est defaultcoordsys. show(defaultcoordsys); // Définissons un nouveau repère pair pO2=(2,1); // (coordonnées dans currentcoordsys) // Définition d'un nouveau repère (changement d'origine) coordsys R=cartesiansystem(pO2,i=(1,0),j=(0,1)); // et affichons le... en étiquetant O'son origine pO2. show("$O'$",R); // Définition et placement du point A(1;2)dans le repère R point pA=point(R, (1,2)); dot("$A$",pA); // et maintenant le point B(1;2) dans le repère par défaut pair pB=(1,2); dot("$B$",pB); // on pourrait aussi définir pB ainsi : // point pB=point(defaultcoordsys, (1,2)); |
|
|
// import geometry_dev; // extension devenue l'extension geometry officielle import geometry; // le 12/05/09, dans la version 1.71 d'asymptote. :-)) size(7cm,0); // Affichage du repère par défaut // le repère courant est currentcoordsys // dont la valeur par défaut est defaultcoordsys. show(defaultcoordsys); // Définissons un nouveau repère coordsys R=cartesiansystem((2,1),i=(1,1),j=(-1,1)); // et affichons le... en étiquetant son origine O' : show("$O'$","$\vec{u}$","$\vec{v}$",R); // Définition et placement du point A(1;2)dans le repère R point pA=point(R, (1,1.5)); dot("$A$",pA,N); draw(projection(Ox(R))*pA--pA--projection(Oy(R))*pA,dashed); |
|
|
// import geometry_dev; // extension devenue l'extension geometry officielle import geometry; // le 12/05/09, dans la version 1.71 d'asymptote. :-)) size(7cm,0); // On définit un stylo, pen p=.8bp+blue; // ... un second repère coordsys R=cartesiansystem((1,2),i=(1,0),j=(-1,1)); // On affiche les deux repères. show(currentcoordsys); show(Label("$O'$",p), Label("$\vec{u}$",p), Label("$\vec{v}$",p), R, ipen=p); // Point A(2,1) dans le repère par défaut, en rouge pair A=(2,1); dot("", A, SW, red); // et B le couple de coordonnées de A dans le repère R point B=point(R, A/R); dot("", B, NE, p); |
|
|
// Un exemple pour expliquer qu'il y a deux // types possibles pour définir des points : // - le type pair (défini nativement dans asymptote) est // un couple de réel dans le repère par défaut ; // - le type point (défini dans l'extension geometry) // est un couple de réel relatif à un repère choisi. import geometry; size(7cm,0); // Le repère courant est currentcoordsys // et sa valeur par défaut est defaultcoordsys. show(defaultcoordsys); pair pA=(1,.5); point pB=(.5,1); dot("$A$",pA,N,5bp+.5red); dot("$B$",pB,N,5bp+.5blue); // On change de répertoire courant et on l'affiche. currentcoordsys=cartesiansystem((2,1),i=(1,1),j=(-1,1)); show("$O'$","$\vec{u}$","$\vec{v}$",currentcoordsys); // On redéfinit un "pair" et un "point" avec les mêmes coordonnées. pair pAp=(1,.5); point pBp=(.5,1); dot("$A'$",pAp,S,3bp+red); dot("$B'$",pBp,S,3bp+blue); |
|
|
// import geometry_dev; // extension devenue l'extension geometry officielle import geometry; // le 12/05/09, dans la version 1.71 d'asymptote. :-)) import graph_pi; size(7cm,0); graphicrules(xunit=1cm, yunit=1cm, xmin=-3, xmax=3, ymin=-3, ymax=7, crop=Crop ); show(defaultcoordsys); coordsys R=cartesiansystem((2,1),i=(1,1),j=(-1,1)); show("$O'$","$\vec{u}$","$\vec{v}$",R); // On définit la fonction et sa courbe (chemin) real f(real x) {return x^2;} path Cf=graph(f,n=400); // R* indique Cf doit être tracée dans R draw(R*Cf,linewidth(1bp)); // On limite la taille de l'image : xlimits(-2,3,Crop); ylimits(-2,5,Crop); |
|
|
import geometry; size(7.5cm,0); // Affichage du repère par défaut (O,vec{i},vec_{j}) show(defaultcoordsys); real a=5, b=4, theta=-27, poids=3; ellipse el = ellipse(origin, a, b); arc ar = arc(el,(0,-b),(a,0),CCW); path p = (0,-b-1)--ar--(a+1,0)--(a+1,-b-1)--cycle; point pO = (0,0), pM=angpoint(ar,90+theta); abscissa abscM = nodabscissa(el,pM); real timeM = abscM.x; vector utangM = -dir(el,timeM), unormM = rotate(90)*utangM, vpoids=(0,-poids), vreactionN = -dot(vpoids,unormM)*unormM, vfrottement = -dot(vpoids,utangM)*utangM; filldraw(p,lightgray,blue); draw(pO--pM,dashed); markangle("$\theta$",1.5cm,pM,origin,(1,0)); // Affichage d'un nouveau repère (M,vec{u_{\theta}},vec_{u_{r}}) coordsys R=cartesiansystem(pM,i=utangM,j=unormM); show("$M$", "$\vec{u_{\theta}}$", "$\vec{u_{r}}$", R, xpen=invisible); // Affichage des trois vecteurs "dans le repère R" // façon de parler pour dire que l'on en trace un représentant // à partir de l'origine du repère R. point RpM=changecoordsys(R, pM); show(Label("$\vec{f}$",EndPoint),RpM+vfrottement); show(Label("$\vec{R}$",EndPoint),RpM+vreactionN); // Autre syntaxe, plus simple : show(Label("$\vec{P}$",EndPoint),origin(R)+vpoids); |
|
|
import geometry; size(7.5cm,0); // Affichage du repère par défaut (O,vec{i},vec_{j}) show("",defaultcoordsys); real a=5, b=4, theta=-40, poids=3; ellipse el = ellipse(origin, a, b); arc ar = arc(el,(0,-b),(a,0),CCW); path p = (0,-b-1)--ar--(a+1,0)--(a+1,-b-1)--cycle; point pO = (0,0), pM=angpoint(ar,90+theta); abscissa abscM = nodabscissa(el,pM); real timeM = abscM.x; vector utangM = -dir(el,timeM), unormM = rotate(90)*utangM, vpoids=(0,-poids), vreactionN = -dot(vpoids,unormM)*unormM, vfrottement = -dot(vpoids,utangM)*utangM; filldraw(p,lightgray,blue); draw(pO--pM,dashed); markangle("$\theta$",1.5cm,pM,origin,(1,0)); // Affichage d'un nouveau repère (M,vec{u_{\theta}},vec_{u_{r}}) coordsys R=cartesiansystem(pM,i=utangM,j=unormM); show("$M$", "$\vec{u_{\theta}}$", "$\vec{u_{r}}$", R, xpen=invisible); // Affichage des vecteurs "dans un repère ou l'autre" // façon de parler pour dire que l'on en trace un représentant // à partir de l'origine d'un repère ou de l'autre. show("",utangM); show("",unormM); show("",origin(R)+vfrottement); show("",origin(R)+vreactionN); show("",origin(R)+vpoids); |
Dernière modification le Wed Dec 21 13:51:41 CET 2011 par G.Marris Valide XHTML